想象一下,一台机器人,通过观看经验丰富的外科医生的手术视频,就能学会并执行相同的复杂手术操作,而且技术娴熟,与人类医生不相上下。这不再是科幻电影中的场景,而是现实中正在发生的突破。
这项由约翰霍普金斯大学和斯坦福大学的研究团队取得的成果,标志着机器人手术领域迈向真正自主的里程碑。他们利用模仿学习训练了达芬奇手术系统机器人,使其能够完成手术中三个基本任务:操控针头、提起组织和缝合。这颠覆了传统的手术机器人编程模式,不再需要为每个动作进行繁琐的代码编写,而是让机器人通过观察学习,掌握手术技巧。
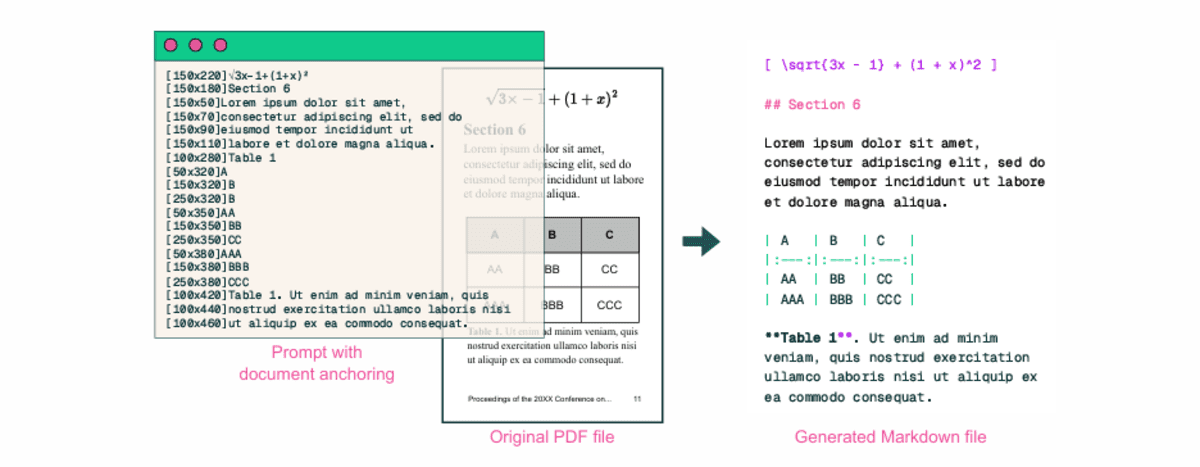
研究团队将模仿学习与 ChatGPT 背后的机器学习架构相结合,但不同的是,这个模型用“机器人语言”——运动学来表达,将机器人的运动角度分解成数学公式。他们向模型输入了来自全球各地外科医生在手术过程中使用达芬奇机器人腕部摄像头拍摄的数百段视频。这些视频原本用于术后分析,现在则成为机器人“模仿”的宝贵素材。

模仿学习与 ChatGPT 背后的机器学习架构相结合。| 图片来源:约翰霍普金斯大学
尽管达芬奇手术系统应用广泛,但其精度一直为人诟病。研究团队巧妙地利用相对运动训练模型,而不是绝对动作,从而克服了这一缺陷。模型能够根据图像输入,自动找到正确的动作,即使只学习了几百个演示,也能掌握手术流程并适应新的环境。
这项技术将彻底改变手术机器人的训练方式,让机器人快速学习各种手术操作。研究团队目前正在利用模仿学习训练机器人完成完整的复杂手术,未来将有望实现真正意义上的机器人自主手术,为患者带来更精准、更安全的医疗服务。

申请演讲
这项突破性成果将彻底改变手术机器人的训练方式。过去,即使是简单的缝合操作,也需要程序员花费数年时间编写代码,而现在,通过模仿学习,机器人可以在几天内学会各种手术操作,这将极大地加速机器人手术的自主化进程,并最终实现更精准、更安全的医疗服务。
这项研究成果由约翰霍普金斯大学和斯坦福大学的科学家共同完成,为机器人手术领域带来了新的曙光,也为未来医疗技术的进步指明了方向。
编者注:本文转载自约翰霍普金斯大学。
文章首发于机器人报告网站。