


MiR 表示,新款 MC600 旨在实现可靠的移动操作。来源:移动工业机器人
虽然人形机器人正在迈出进入工业应用的第一步,但 ASTM 国际正在制定移动机械手的标准。其 F45.05 机器人、自动化和自主系统委员会正在制定一项名为 WK92144 的标准。
移动机械手被广泛定义为一个带有连接的多轴机械臂的自主移动机器人 (AMR) 底座。ANSI/RIA R15.08-1-2020 标准定义了工业移动机器人 (IMR) 的分类方案,其中包括移动机械手作为一类。
ASTM 标准的目标是展示此类机器人的精度,并提供一系列可量化的测试来测量机械臂和移动底座运动的准确性。这项新兴测试标准的研究基于美国国家标准与技术研究院 (NIST) 的一篇论文。

申请演讲。
标准工作重点在于定义和测试
“我们从 2014 年或 2015 年开始这项标准工作,”NIST 论文的合著者、F45 委员会成员奥马尔·阿布尔-埃内因说。“在许多情况下,性能不连续。例如,机械臂和车辆在进行机器看护或组装任务时不会同时移动。我们需要针对离散姿态约束任务的术语。”
他告诉《机器人报告》,2022 年,ASTM 国际将范围扩大到包括机器人和自动化。“NIST 已经使用多种机器人(例如 AGV [自动导引车])测试了非连续性能,然后对大型制造(例如飞机机翼、船首和风力涡轮机叶片)的连续系统进行了实验。”
阿布尔-埃内因解释说,在 R15.08 中,ASTM 一直专注于 AMR 测试,并设有移动操作、抓取式末端执行器和机器人组装的任务组。移动操作组拥有 30 多名成员。
通过支持工件属性的基础测试,ASTM 希望帮助行业创建机器人配置的一致文档。阿布尔-埃内因描述了一种用于移动操作的可配置测试装置,该装置使用低成本组件,设计易于复制,并允许进行现场测试。
然而,新标准不适用于末端执行器、有效载荷或车队行为。阿布尔-埃内因承认,它们可以用来开发机器人及其行为的模拟。
“它绝对有潜力,但现实世界中总有一些因素潜伏着,例如实验室地板的凹陷或机械臂完全伸到一侧时的重量,”他说。“我们一直在研究评估移动机械手并测量其行为的项目,所有这些都基于委员会的共识。这些标准是活的文档。”
ASTM 推出移动机械手测试台
《机器人报告》还联系了 ASTM 国际机器人与自主系统项目主任亚伦·普拉瑟,以详细了解 WK92144 标准及其发展方向。
该组织的 F45 委员会正在推出一个新的测试台,该工具有助于展示移动机械手的精度,将机械臂和底座的运动联系起来。机器人必须尝试在桌面上移动,同时机械臂在桌面上执行任务。这些任务包括跟踪 S 形黑色区域进行焊接或粘合,以及插入销钉。
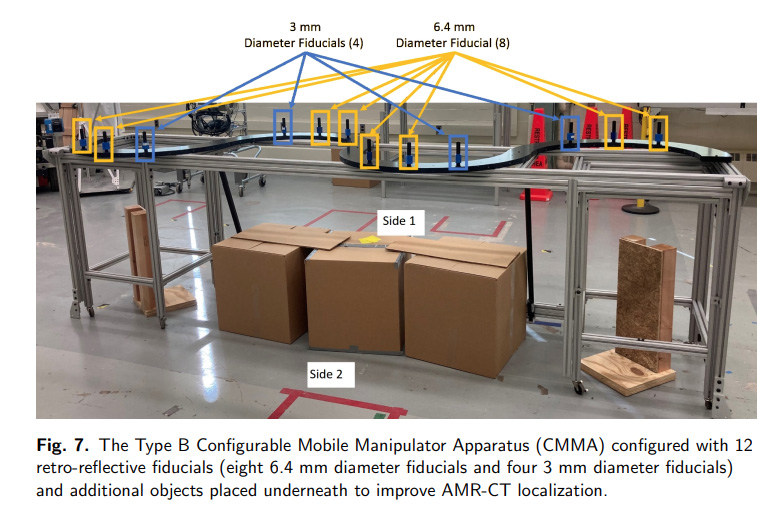
普拉瑟提供的这张图片是 F45 团队为测试新兴标准而构建的早期原型。| 来源:亚伦·普拉瑟,ASTM
操作员可以调整桌面使其处于 90 度,倾斜至 45 度,或平放至 0 度。为了使测试更具挑战性,他们可以连接一个振动器,增加运动和振动。
“桌子设计将标准化,委员会将提供关于每个人如何建造自己的桌子的说明,”普拉瑟说。“计划根据桌子制定几个测试标准。目标是让 NIST 任务板和这个新桌子成为我们测试新的抓取/操作/组装应用的准确性和可重复性的基础。”
“此外,预计我们将看到我们的新学生竞赛挑战使用这些板和桌子,”他补充说。“这将有助于让学生参与到如何使用标准中,并将他们送入社区,让他们了解如何利用这些我们将继续推出的新测试工具,以确保新的机器人系统能够通过这些测试。”
“我们希望看到人形机器人和移动机械手必须展示其结果,以帮助最终用户更好地了解功能,并确保他们获得了适合其应用的正确系统,”普拉瑟说。
文章《ASTM 制定移动机械手测试标准》最初发表于《机器人报告》。





