

韩国机械材料研究院(KIMM)可靠性部门首席研究员金永镇博士(右)和高级研究员金永基博士(左)共同开发了一种自动化系泊系统。| 来源:韩国机械材料研究院
韩国机械材料研究院(KIMM)开发了一种自动化系泊系统,旨在提高无人驾驶船舶码头操作的安全性和效率。该研究院设计该系统是为了克服传统基于缆绳的系泊方法的局限性。KIMM表示,预计该创新将在2025年实现商业化。
“这种自动化系泊系统代表了无人驾驶船舶安全靠泊的关键进步,将在智能港口基础设施发展中发挥关键作用,”KIMM可靠性部门首席研究员金永镇博士表示。“我们预计该解决方案将为整个海洋行业的安全性和效率运营树立新的标准。”
韩国机械材料研究院是一个非营利性政府资助的研究机构,隶属于科学技术信息通信部。自1976年成立以来,KIMM通过研究和开发机械和材料的关键技术、进行可靠性评估以及将产品商业化,为韩国的经济增长做出了贡献。
KIMM 致力于打造更安全、更快速的系泊流程
过去,工人们使用粗厚的系泊缆绳手动将船舶固定在港口。这种方法需要很高的抗拉强度,具体取决于船舶的大小和重量。如果缆绳断裂,存在发生事故的风险,而且手动系泊过程需要大量人力和时间。
KIMM表示,其自动化系泊系统直接解决了这些挑战。它使用真空吸盘进行安全固定,并使用灵活的四自由度液压系统进行自动化控制。
研究人员表示,这项新技术可以简化系泊过程,提高速度和精度,同时降低事故风险和劳动力需求。

用于吸力定量评估的实际夹具。来源:KIMM
韩国团队获得认可,为商业化做好准备
金永镇博士在院长柳锡贤的带领下,领导了KIMM的团队。金永基博士担任高级研究员。
该研究院的项目是在韩国海洋水产部的支持下,在“智能港口-无人驾驶船舶联动技术开发”计划下进行的。由于其创新性和影响力,该技术被韩国机械工程学会联合会评为“年度韩国十大机械技术”之一。
该技术将在2025年进行海上最终性能验证,之后将完成技术开发,包括将该系统商业化的努力。
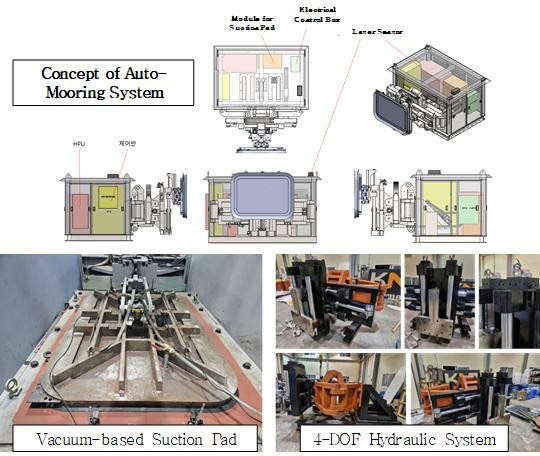
从概念到制造产品的自动化船舶系泊平台。来源:KIMM
文章首发于机器人报告。





